
🚜 ISO11783 (ISOBUS) 완전 정복 – 스마트 농업의 핵심 통신 표준
📘 ISO11783이란?
ISO11783은 국제 표준으로, 농업 및 임업 기계의 전자 제어 시스템 간 통신을 정의합니다. 이 표준은 다양한 제조사의 기계들이 같은 프로토콜로 통신할 수 있도록 보장하여, 플러그 앤 플레이 환경을 제공합니다.
🧱 구조 및 구성
ISO11783은 14개 파트로 구성되어 있으며, 각각의 파트는 다음과 같은 기능을 수행합니다:
- Part 1: 일반 원칙
- Part 2: 물리 계층 (CAN-Bus 기반)
- Part 3~6: 데이터 링크, 네트워크 관리
- Part 7: 사용자 인터페이스
- Part 10: 작업 제어 장치 (TC - Task Controller)
- Part 11: 파일 서버
- Part 13: 진단 통신
🔧 주요 기능
- 트랙터와 작업 기계 간 제어 명령 송수신
- 작업 데이터 로깅 및 교환
- GPS 기반 정밀 농업 지원
- ISOBUS 터미널을 통한 통합 디스플레이 제어
🌾 적용 분야
ISO11783은 다음과 같은 스마트 농업 기술에서 활용됩니다:
- 자율주행 트랙터 시스템
- 비료·종자 분사량 자동 조절
- 정밀 파종 및 수확 작업
- 농작업 계획 및 보고서 자동 생성
📊 다른 통신 프로토콜과 비교
| 프로토콜 | 주요 용도 | 전송 속도 | 상호운용성 |
|---|---|---|---|
| ISO11783 | 농업 기계 간 통신 | 250 kbps | 매우 높음 |
| CANopen | 산업용 자동화 | 1 Mbps | 중간 |
| Modbus | 일반 산업기기 | 속도 낮음 | 낮음 |
💡 향후 전망
스마트 농업의 확산과 함께 ISO11783의 중요성은 더욱 커지고 있습니다. 특히, 클라우드 기반 작업 데이터 연동, 드론 및 로봇과의 통합 등이 활발히 논의되고 있으며, AI 기반 농업 자동화와의 연계도 기대됩니다.
🔗 참고자료
ISO 11783 - Wikipedia
From Wikipedia, the free encyclopedia Computer network protocol Agricultural implement ISOBUS plug ISO 11783, known as Tractors and machinery for agriculture and forestry—Serial control and communications data network (commonly referred to as "ISOBUS") i
en.wikipedia.org
✅ 간단한 ISOBUS 동작 흐름도 (설명 포함)
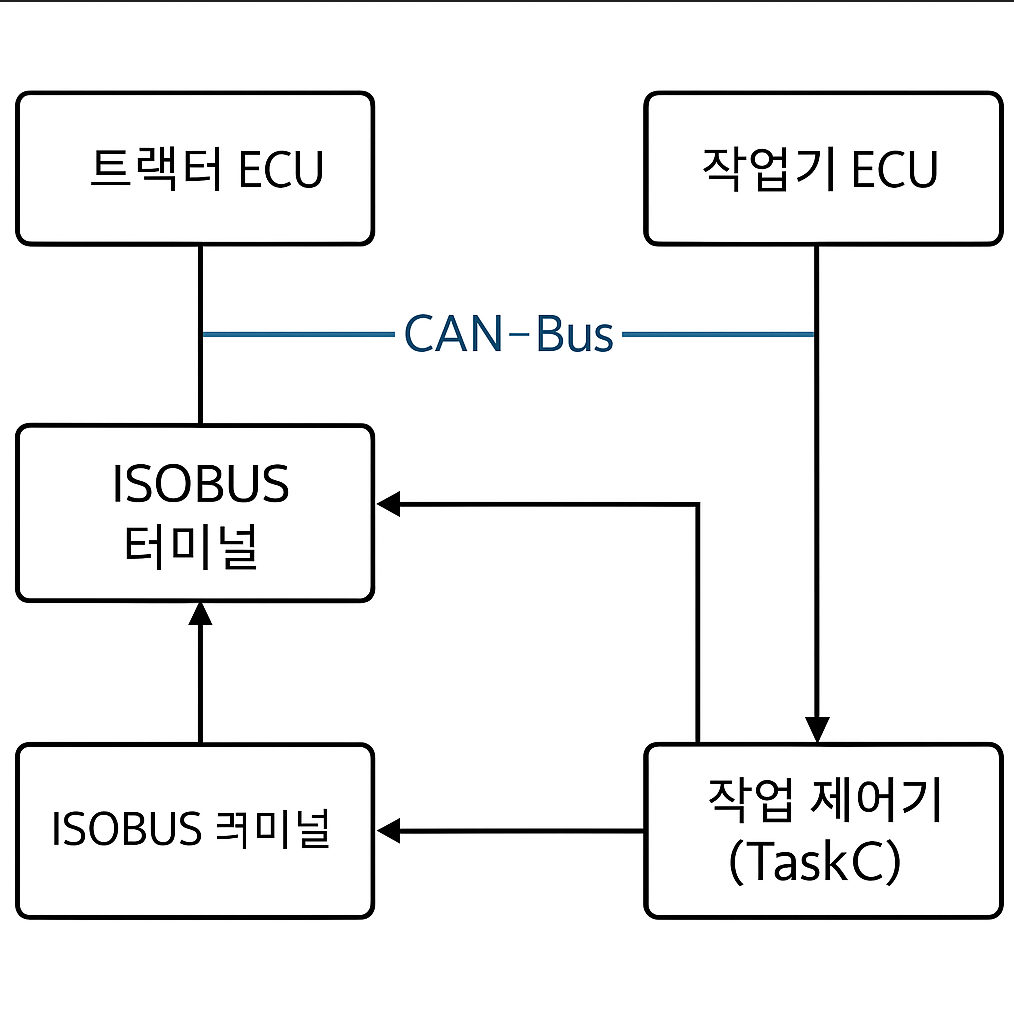
ISOBUS (ISO11783)의 기본적인 흐름은 트랙터 ↔ 작업기 ↔ 사용자 디스플레이 (터미널) 간 통신을 중심으로 합니다. 아래는 그 흐름을 설명한 이미지입니다.
🔄 ISOBUS 통신 흐름 개요
│ 트랙터 ECU │◀──────────────────▶│ 작업기 ECU │
└─────────────┘ └─────────────┘
▲ ▲
│ │
▼ ▼
┌────────────────┐ ┌────────────────────┐
│ ISOBUS 터미널 │◀──────────▶│ 작업 제어기(TaskC) │
└────────────────┘ └────────────────────┘
- 트랙터 ECU: 엔진, 속도, 유압 등 데이터를 수집
- 작업기 ECU: 비료 살포기, 파종기 등과 연결되어 상태/명령 송수신
- ISOBUS 터미널: 운전자 조작 UI (모든 장비를 하나의 디스플레이에서 제어)
- Task Controller: 작업 명령 및 데이터 저장 (e.g. 파종 위치, 분사량)
✅ ISOBUS 실무 예시 (CAN 통신 기반 Python 코드)
실제 ISOBUS 통신은 CAN 프로토콜을 기반으로 작동합니다. 아래는 Python을 이용해 ISO11783 메시지를 시뮬레이션하는 예시입니다.
import can
import time
# CAN 채널 설정 (예: PCAN, USB-to-CAN 장치 사용 시)
bus = can.interface.Bus(bustype='socketcan', channel='can0', bitrate=250000)
# ISO11783 PGN 예시 (예: 엔진 속도 정보 전송)
pgn = 0xF004 # ISO11783 엔진 속도 PGN
priority = 3
source_address = 0x10 # 트랙터
destination_address = 0xFF # 브로드캐스트
# 데이터 패킷 구성 (RPM = 1500)
rpm_value = int(1500 * 8) # ISO11783 기준으로 변환
data = [rpm_value & 0xFF, (rpm_value >> 8) & 0xFF] + [0xFF] * 6
# CAN ID = (priority << 26) | (PGN << 8) | source
can_id = (priority << 26) | (pgn << 8) | source_address
msg = can.Message(arbitration_id=can_id, data=data, is_extended_id=True)
try:
bus.send(msg)
print("ISO11783 메시지 전송 완료")
except can.CanError:
print("전송 실패")
📌 참고사항:
- 실제 구현 시에는 python-can, can-utils, 또는 Vector, Kvaser 하드웨어가 필요할 수 있습니다.
- ISO11783의 PGN, 데이터 해석은 isobus.net에서 확인 가능합니다.
🔗 더 알아보기
'Infomation' 카테고리의 다른 글
| 트럼프 관세 연기 발표, 글로벌 증시 급반등! — 중국만 예외 적용, 앞으로의 영향은? (2) | 2025.04.10 |
|---|---|
| 트럼프의 보복 관세, 다시 불붙은 미중 무역전쟁 — 글로벌 증시 흔들, 세계는 어떻게 대응하고 있을까? (3) | 2025.04.09 |
| 가우시안 노이즈란? — 이미지와 데이터 분석에서의 이해 (0) | 2025.04.09 |
| AI 이미지·영상 생성 툴 추천 및 비교 (1) | 2025.04.09 |
| 트럼프의 관세 정책과 한국 경제에 미치는 영향 (1) | 2025.04.03 |



